【TRIO-Basic从入门到精通教程六】3D仿真、同步控制的使用1
作者:Gmotion
发布时间:2017-03-19
更新时间:2023-12-30
点击数:
很多朋友都对可视化控制好奇,问我如何使用TRIO 3D示波器。今天刚好有时间和大家一起讨论,由于笔者的实力有效,不能做到面面俱到,请勿怪罪!
这节课用大家感兴趣的SCARA机器人仿真做演示。废话少说,马上上图。
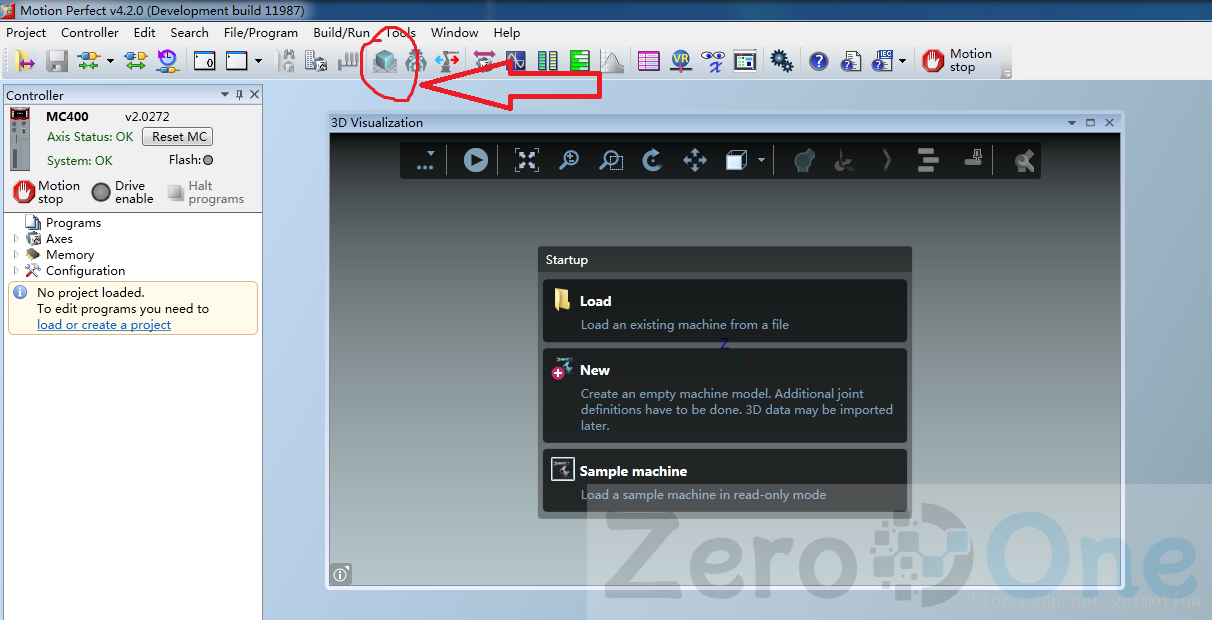
1、点击工具栏示波器按钮
2、导入OBJ文件->Scara.obj文件
obj文件可以由Proe生成,UG笔者不会使用。具体步骤:画出装备图,装备图导出obj格式文件。由于这里重点讲TRIO 3d仿真器,这块就不细讲!
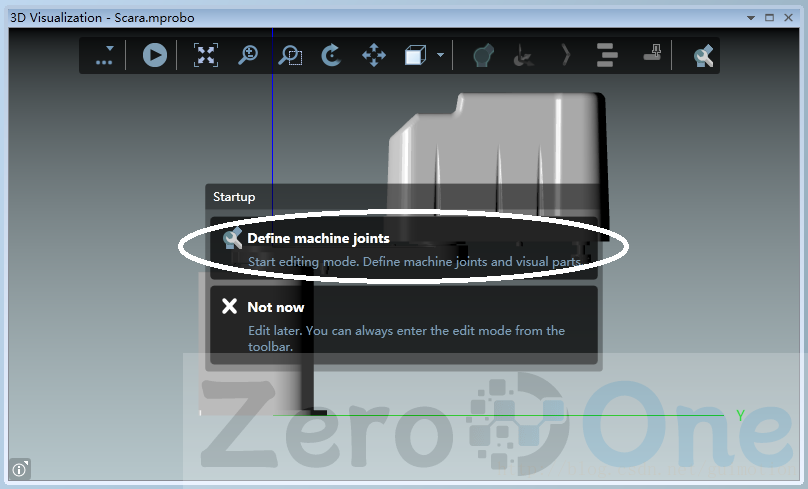
3、这里是本讲重点=》定义关节
定义关于要点:从基轴开始,向其他关节轴扩展
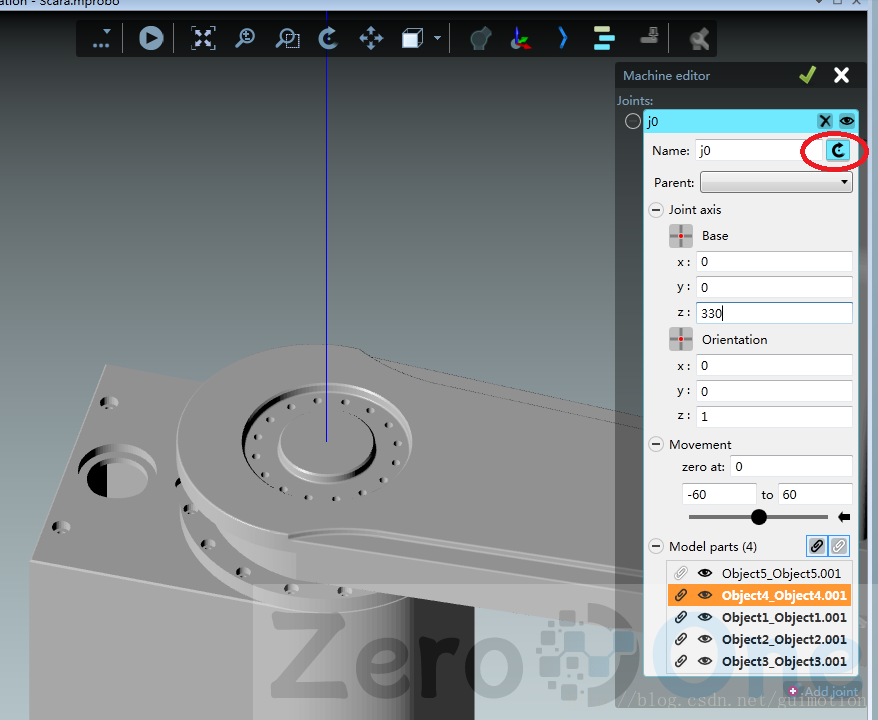
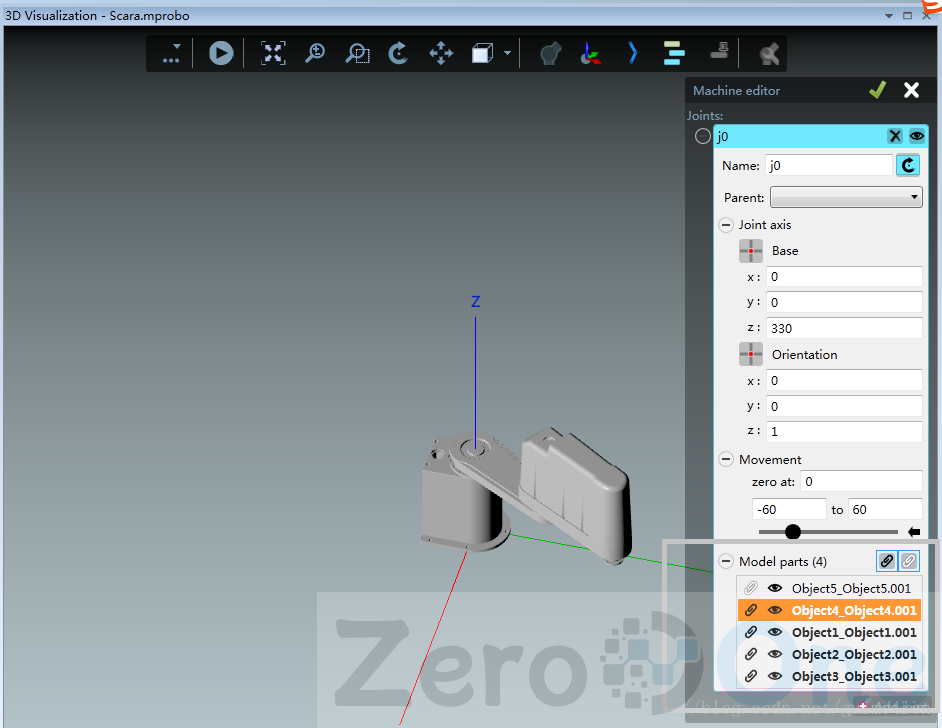
4、建立关节J0
下图按钮点开=》可以选择本关节直线运动还是旋转运动
下图有两个关节轴参数:
基础参数=》可以用《+》快速选择再微调或者根据机械参数输入(机械参数输入基于设备的原点XYZ控件坐标)
运动方向参数=》这个参数简单理解就是当前轴跟随哪个方向运动:旋转运动就是轴绕这个方向旋转,直线运动就是这个方向直线移动。
j0关节旋转运动
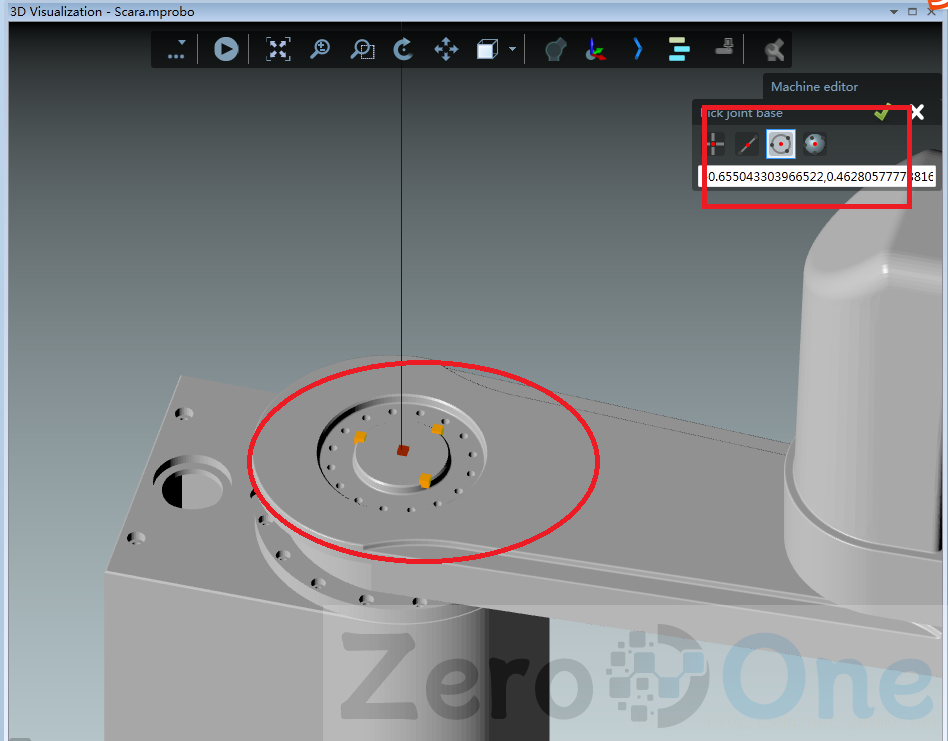
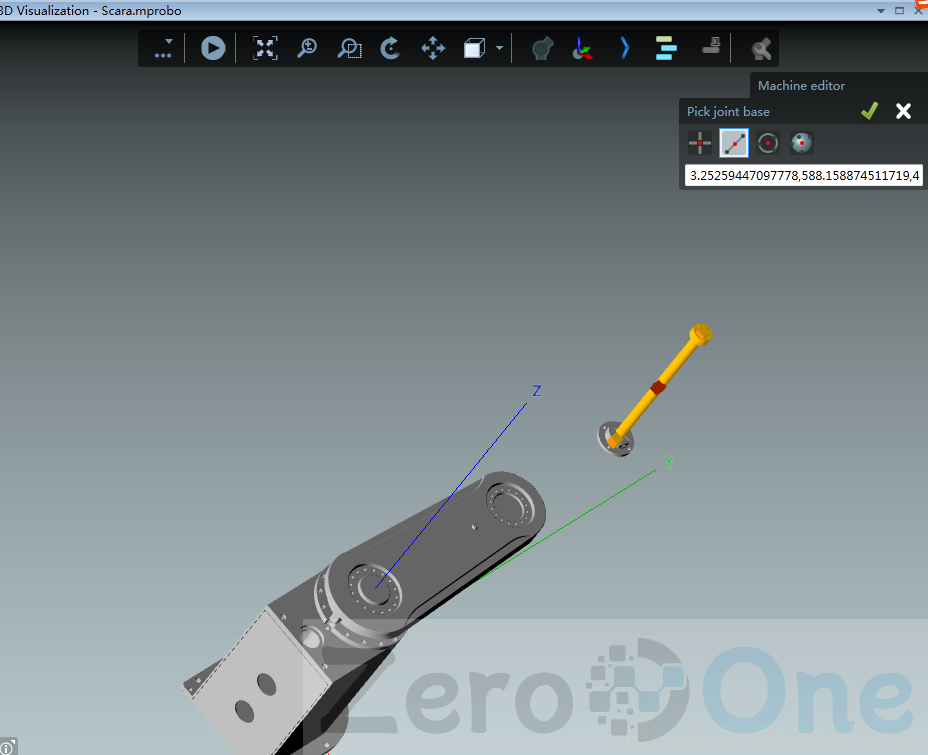
本讲使用BASE + 快速定出旋转基准点中心
=》选中圆心三点=》自动定出圆心=》确认
5、测试本关节运动
模块关联:选中需要绕本关节运动的所有模块
movement运动横拉框移动就能控制关节运动,通过这种方式可以验证关节配置的正确性
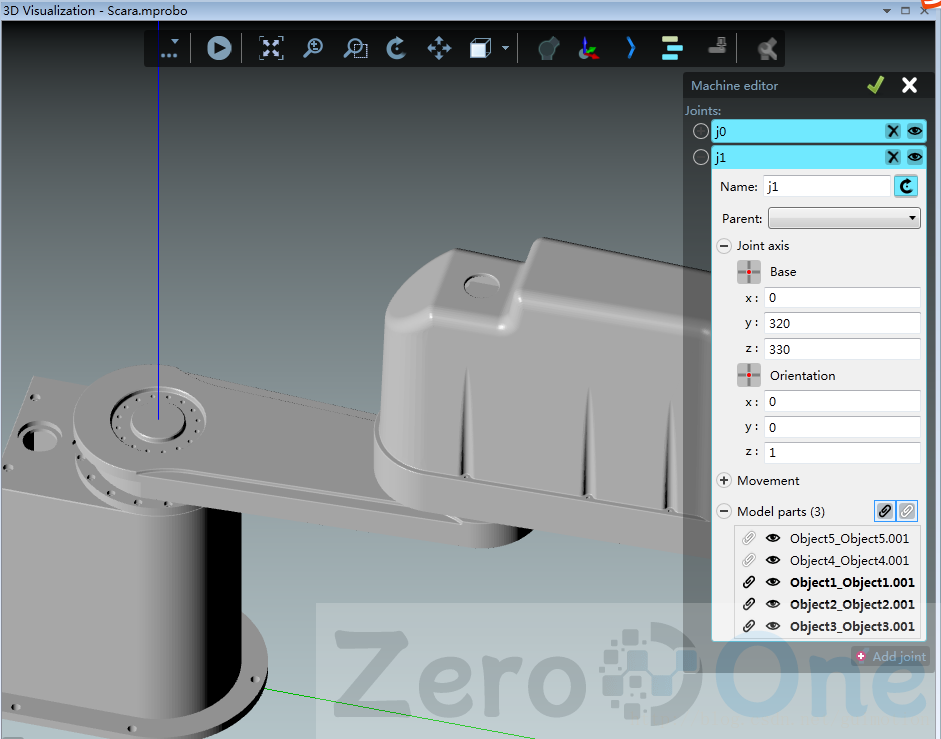
6、J1关节配置的方式和j0类似,就不细讲
j也是关节旋转运动

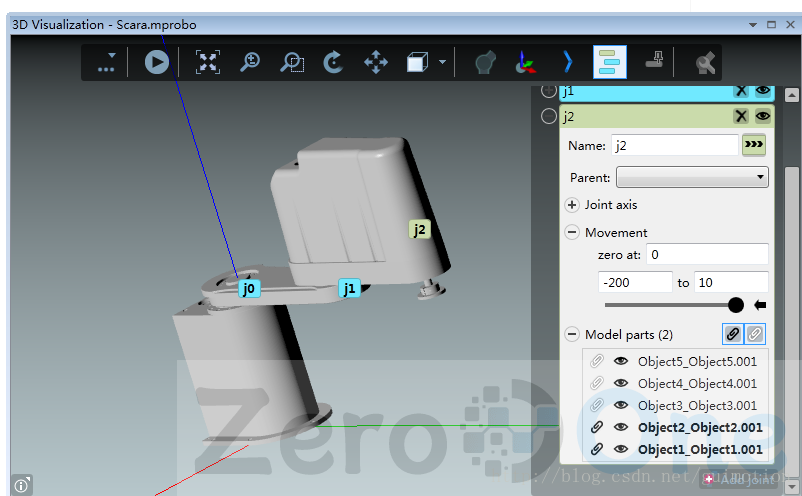
7、J2直线运动关节配置
直线运动通过定两点确认直线运动
由于文章长度有限,下节内容再见.