【TRIO-Basic从入门到精通教程四】轴类型ATYPE精讲
各位朋友,几天不见!今天我给大家带来的内容是轴类型ATYPE精讲课程!不知道大家对TRIO支持的轴类型有没有简单的了解!我们TRIO通过修改ATYPE的数值,得到多种轴类型的支持!废话少说,我们看图!
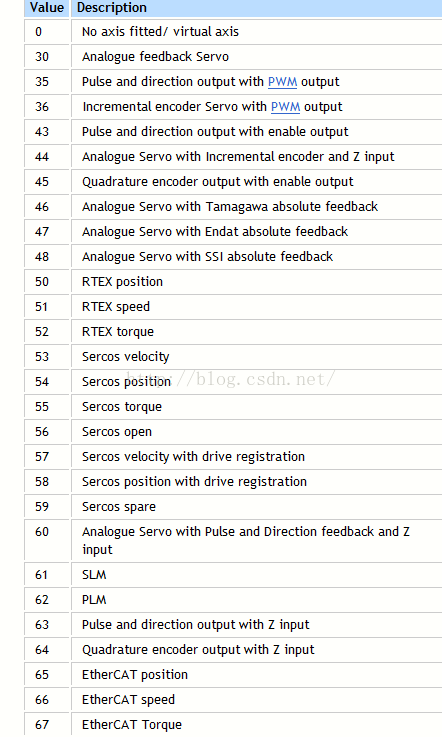
上图就是我们现在第四代产品支持的轴类型。接下来我们队轴类型详细讲解!
ATYPE=0 No axis fitted/ virtual axis
这个就简单了,虚拟轴!
ATYPE=30 Analogue feedback Servo
模拟量闭环,模拟量输入模拟量输出进行闭环。常见应用,液压、张力伺服控制!
ATYPE=35 Pulse and direction output with PWM output
脉冲+方向输出并且带Z向PWM输出!
ATYPE=36 Incremental encoder Servo with PWM output
AB增量编码器输出并且带Z向PWM输出
ATYPE=43 Pulse and direction output with enable output
脉冲+方向输出并且带Z向使能输出!(这个常用于步进驱动器或者伺服开环位置控制)
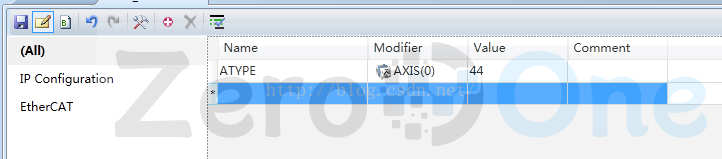
ATYPE=44 Analogue Servo with Incremental encoder and Z input
模拟量输出+AB增量编码器反馈并带Z零点信号进行闭环(这个常用于伺服闭环控制速度控制)
ATYPE=45 Quadrature encoder output with enable output
AB增量编码器输出并且带Z向使能输出
ATYPE=46 Analogue Servo with Tamagawa absolute feedback
模拟量输出+多摩川绝对值编码器反馈进行闭环
ATYPE=47 Analogue Servo with Endat absolute feedback
模拟量输出+海德汉ENDAT绝对值编码器反馈进行闭环
ATYPE=48 Analogue Servo with SSI absolute feedback
模拟量输出+SSI绝对值编码器反馈进行闭环
ATYPE=50 RTEX position
松下RTEX伺服总线位置环控制
ATYPE=51 RTEX speed
松下RTEX伺服总线速度环控制
ATYPE=52 RTEX torque
松下RTEX伺服总线扭矩环控制
ATYPE=53 Sercos velocity
Sercos 总线速度环控制
ATYPE=54 Sercos position
Sercos 总线位置环控制
ATYPE=55 Sercos torque
Sercos 总线扭矩环控制
ATYPE=56 Sercos open
Sercos 总线开环控制
ATYPE=57 Sercos velocity with drive registration
Sercos 总线扭速度环控制并带驱动色标捕捉
ATYPE=58 Sercos position with drive registration
Sercos 总线扭位置环控制并带驱动色标捕捉
ATYPE=59 Sercos spare
Sercos 总线空闲
ATYPE=60 Analogue Servo with Pulse and Direction feedback and Z input
模拟量输出+脉冲方向编码器反馈并带Z零点信号进行闭环
ATYPE=61 SLM
SLM通讯轴
ATYPE=62 PLM
PLM通讯轴
ATYPE=63 Pulse and direction output with Z input
脉冲+方向输出并且带Z零点信号输入!
ATYPE=64 Quadrature encoder output with Z input
AB增量编码器输出带Z零点信号输入
ATYPE=65 EtherCAT position
EtherCAT 总线位置控制
ATYPE=66 EtherCAT speed
EtherCAT 总线速度控制
ATYPE=67 EtherCAT Torque
EtherCAT 总线扭矩控制
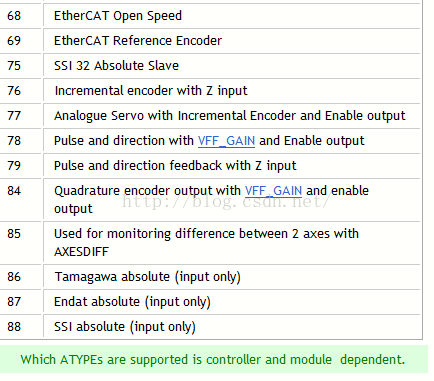
ATYPE=68 EtherCAT Open Speed
EtherCAT 总线开环控制
ATYPE=69 EtherCAT Reference Encoder
EtherCAT 总线编码器反馈
ATYPE=75 SSI 32 Absolute Slave
SSI绝对值32bit从站
ATYPE=76 Incremental encoder with Z input
AB增量编码器输入(常用于增量编码器输入)
ATYPE=77 Analogue Servo with Incremental Encoder and Enable output
模拟量输出+AB增量编码器反馈并带Z向使能输出进行闭环控制
ATYPE=78 Pulse and direction with VFF_GAIN and Enable output
脉冲+方向输出并带速度前馈带Z向使能输出控制
ATYPE=79 Pulse and direction feedback with Z input
脉冲+方向输入并带Z向零点输入做编码器
ATYPE=84 Quadrature encoder output with VFF_GAIN and enable output
AB增量编码器输出带速度前馈并且带Z向使能输出
ATYPE=85 Used for monitoring difference between 2 axes with AXESDIF
龙门轴用于两轴动态速度纠偏
ATYPE=86 Tamagawa absolute (input only)
多摩川增量编码器输入
ATYPE=87 Endat absolute (input only)
海德汉ENDAT编码器输入
ATYPE=88 SSI absolute (input only)
SSI编码器输入
上述就是TRIO第四代产品轴类型,推荐将轴参数设置在MC_CONFIG中
补充说明:
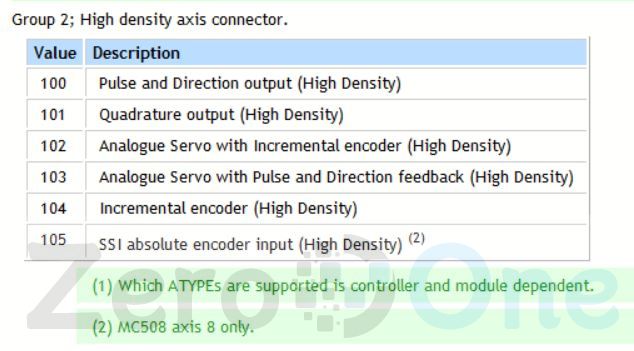
轴参数用于508控制器,高密度轴场合
ATYPE=100 脉冲方向输出
ATYPE=101 正交AB脉冲输出
ATYPE=102 模拟量输出+AB增量编码器反馈
ATYPE=103 模拟量输出+脉冲方向编码器反馈
ATYPE=104 AB编码器输入
ATYPE=105 SSI编码器输入
508需要单个轴做双轴使用,例如轴0-轴8必须使用上述轴类型。
内容就讲在这里,各位朋友有不懂得或者其他不懂得不懂之处,留言提出!我们将做新的课程讲解!
谢谢大家!